A Sample Program with Two Threads
Below is a program that uses some of eCos' system calls. It creates two threads, each of which goes into an infinite loop in which it sleeps for a while (using cyg_thread_delay()). This code is found in the file twothreads.c in the examples directory.
eCos two-threaded program listing
#include <cyg/kernel/kapi.h>
#include <stdio.h>
#include <math.h>
#include <stdlib.h>
/* now declare (and allocate space for) some kernel objects,
like the two threads we will use */
cyg_thread thread_s[2]; /* space for two thread objects */
char stack[2][4096]; /* space for two 4K stacks */
/* now the handles for the threads */
cyg_handle_t simple_threadA, simple_threadB;
/* and now variables for the procedure which is the thread */
cyg_thread_entry_t simple_program;
/* and now a mutex to protect calls to the C library */
cyg_mutex_t cliblock;
/* we install our own startup routine which sets up threads */
void cyg_user_start(void)
{
printf("Entering twothreads' cyg_user_start() function\n");
cyg_mutex_init(&cliblock);
cyg_thread_create(4, simple_program, (cyg_addrword_t) 0,
"Thread A", (void *) stack[0], 4096,
&simple_threadA, &thread_s[0]);
cyg_thread_create(4, simple_program, (cyg_addrword_t) 1,
"Thread B", (void *) stack[1], 4096,
&simple_threadB, &thread_s[1]);
cyg_thread_resume(simple_threadA);
cyg_thread_resume(simple_threadB);
}
/* this is a simple program which runs in a thread */
void simple_program(cyg_addrword_t data)
{
int message = (int) data;
int delay;
printf("Beginning execution; thread data is %d\n", message);
cyg_thread_delay(200);
for (;;) {
delay = 200 + (rand() % 50);
/* note: printf() must be protected by a
call to cyg_mutex_lock() */
cyg_mutex_lock(&cliblock); {
printf("Thread %d: and now a delay of %d clock ticks\n",
message, delay);
}
cyg_mutex_unlock(&cliblock);
cyg_thread_delay(delay);
}
} |
When you run the program (by typing continue at the (gdb) prompt) the output should look like this:
Starting program: BASE_DIR/examples/twothreads.exe Entering twothreads' cyg_user_start() function Beginning execution; thread data is 0 Beginning execution; thread data is 1 Thread 0: and now a delay of 240 clock ticks Thread 1: and now a delay of 225 clock ticks Thread 1: and now a delay of 234 clock ticks Thread 0: and now a delay of 231 clock ticks Thread 1: and now a delay of 224 clock ticks Thread 0: and now a delay of 249 clock ticks Thread 1: and now a delay of 202 clock ticks Thread 0: and now a delay of 235 clock ticks |
Note: When running in a simulator the delays might be quite long. On a hardware board (where the clock speed is 100 ticks/second) the delays should average to about 2.25 seconds. In simulation, the delay will depend on the speed of the host processor and will almost always be much slower than the actual board. You might want to reduce the delay parameter when running in simulation.
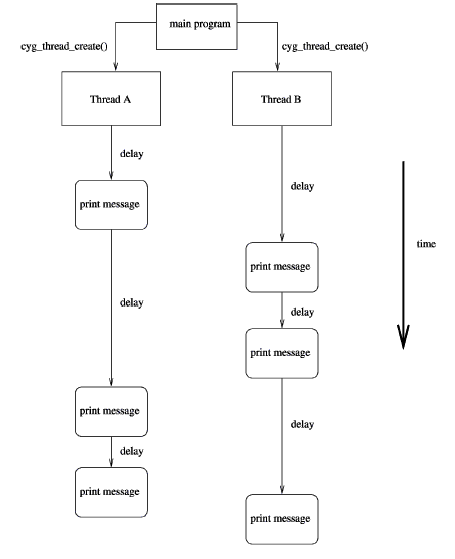
Figure 13-1 shows how this
multitasking program executes. Note that apart from the thread
creation system calls, this program also creates and uses a
mutex for synchronization
between the printf() calls in the two
threads. This is because the C library standard I/O (by default) is
configured not to be thread-safe, which means that if more than one
thread is using standard I/O they might corrupt each other. This is
fixed by a mutual exclusion (or mutex) lockout
mechanism: the threads do not call printf() until
cyg_mutex_lock() has returned, which only happens
when the other thread calls
cyg_mutex_unlock().
You could avoid using the mutex by configuring the C library to be thread-safe (by selecting the component CYGSEM_LIBC_STDIO_THREAD_SAFE_STREAMS).